I was able to get some basic facial detection working in OpenCV with Python. Here's what it looks like:
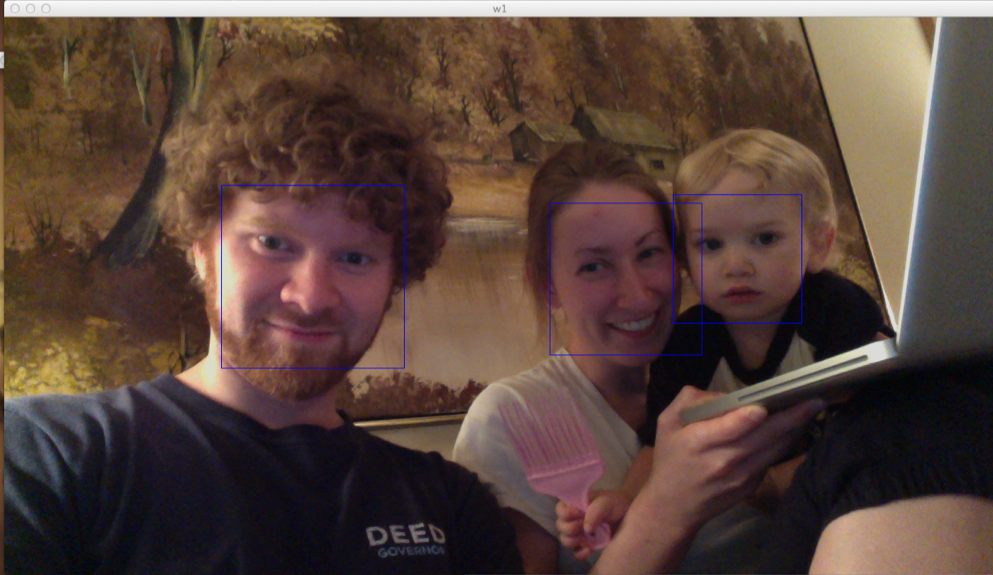
And here is the 34-line python script to draw boxes around all detected faces in live video:
import cv
HAAR_CASCADE_PATH = "/opt/local/share/OpenCV/haarcascades/haarcascade_frontalface_default.xml"
CAMERA_INDEX = 0
def detect_faces(image):
faces = []
detected = cv.HaarDetectObjects(image, cascade, storage, 1.2, 2, cv.CV_HAAR_DO_CANNY_PRUNING, (100,100))
if detected:
for (x,y,w,h),n in detected:
faces.append((x,y,w,h))
return faces
if __name__ == "__main__":
cv.NamedWindow("Video", cv.CV_WINDOW_AUTOSIZE)
capture = cv.CaptureFromCAM(CAMERA_INDEX)
storage = cv.CreateMemStorage()
cascade = cv.Load(HAAR_CASCADE_PATH)
faces = []
i = 0
while True:
image = cv.QueryFrame(capture)
# Only run the Detection algorithm every 5 frames to improve performance
if i%5==0:
faces ...